11
全部商品分类
 玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00
玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00 手机壳模具(UG8.5)¥0
手机壳模具(UG8.5)¥0 CAD字体¥0
CAD字体¥0 花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00
花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00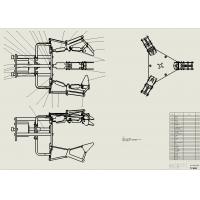 6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00
6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00 PLC控制的一种平面关节型机器人设计 PDF...¥0
PLC控制的一种平面关节型机器人设计 PDF...¥0 灾害救援机器人的设计(说明书+CAD图纸+SOLIDWORKS三维图+...¥50.00
灾害救援机器人的设计(说明书+CAD图纸+SOLIDWORKS三维图+...¥50.00 毕业设计 螺旋输送机设计(论文+CAD图纸+SolidWorks三维图...¥49.00
毕业设计 螺旋输送机设计(论文+CAD图纸+SolidWorks三维图...¥49.00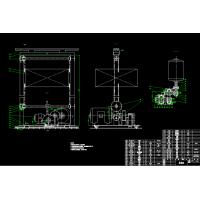 自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00
自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00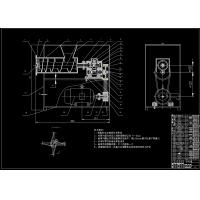 绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00
绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00中文摘要
本次设计的连杆搬运机械手共有4个自由度,分别为x,y方向的水平移动、z方向的垂直移动和转动。实现了从工作台上快速抓取连杆并将连杆传送到下一个工作台的过程。使工人摆脱了以往繁重和危险的手工操作劳动,极大的提高了劳动生产率。
该机械手的驱动方式为气动与电动相结合,采用了行程可调的汽缸,和新型的交流伺服电机以及大传动比的减速器。设备定期维护和保养,以确保润滑和运行情况良好。
关键词:机械手 铰链 自由度 气缸
ABSTRACT
The manipulator of pole parts taking out have four degree of freedom.Respectively X、Yof direction horizontal movement,vertical movement of Z direction.And the swing of the sucking disk shelf,have realized that picks the products from the moulding plastic machine,and transmit the products to the course of the next production process.That makes worker to improve work productivity greatly and get off from heavy and dangerous handcraft.
This manipulator’s drive way is combine together with tneumatically and electronic,utilize a cylinder, a new type of AC servomotor and a decelerating machine which has a wide decelerate ratio are used,
And what’s more, the machine must be maintained after a few weeks or months in order to make it in good lubrication and work in a normal condition .
KEY WORDS:Manipulator, Pintle, Freedom degree, Air cylinder
目 录
…………